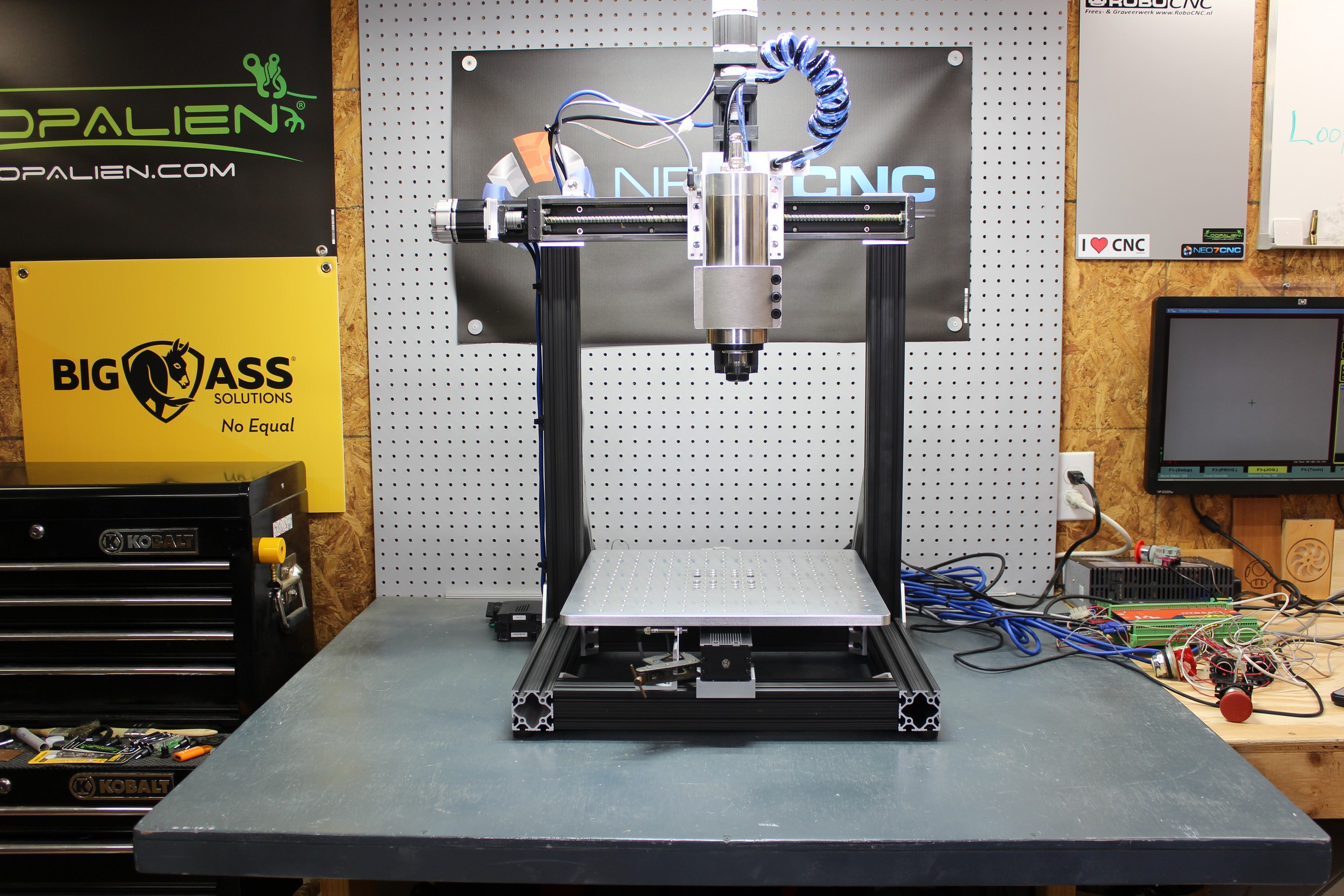
I’ve been asked this question many times since I started using the ClearPath DC servo motors from Teknic. First, lets review the WHY you’d need to use one. Unlike standard stepper motors, most servos do not present any resistance to rotation when the aren’t powered or enabled. Meaning that if the servo motor encounters a fault condition or loses power, it can freely spin. On the X and Y axis of most vertical CNC machines this may not be an issue. However, on the Z axis, you have all the weight of the spindle motor and brackets pulling down on it. Gravity will take over if there is a fault or lose of power. This could be catastrophic for the spindle, endmill, work piece or even the CNC machine itself.
To safeguard against the Z accidentally dropping, we can use an electro-mechanical brake between the shaft of the servo and the shaft of the ballscrew that moves the Z axis up and down. For this example, I’m using a brake from Inertia dynamics that I found on eBay. It operates on 24vdc and when at rest (unpowered), it’s locked. If you supply it with 24vdc it unlocks and it can rotate.
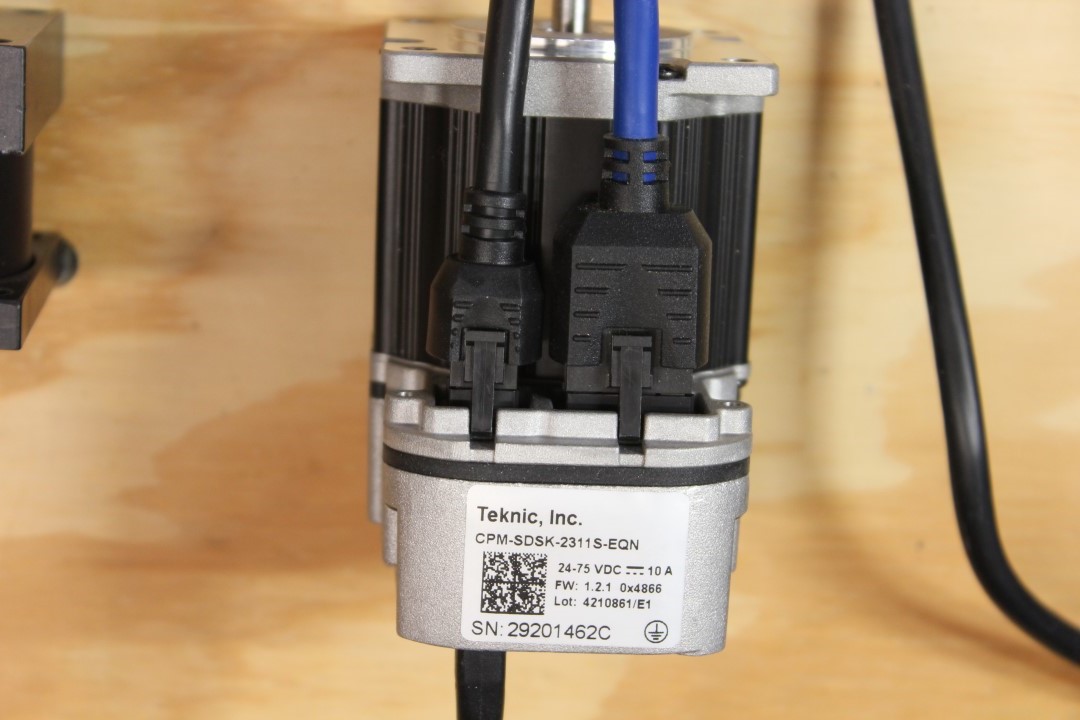
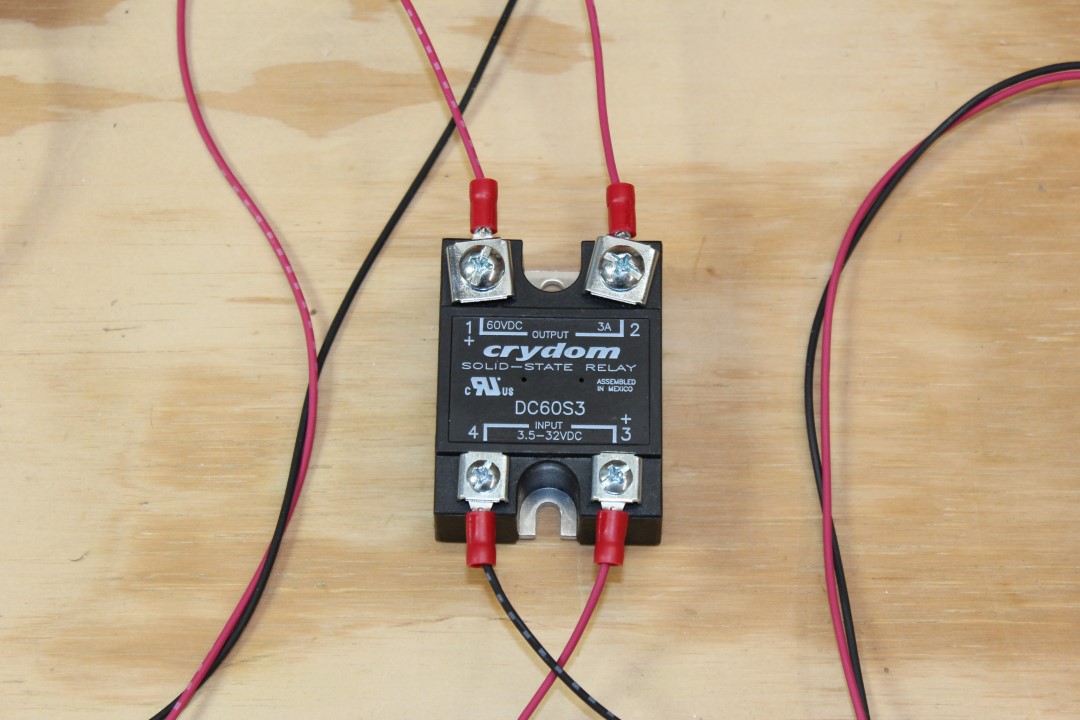
The overall setup is straightforward. The ClearPath servo has all the control we need already built in. There is an output from the servo that is “ON” when the servo is powered AND enabled. We’ll use this logic combined with a Crydon solid state relay to control the brake. Wiring is also pretty simple. We’ll also need power supplies to power the relay, brake and servo (servo power supply not pictured). The Allen-Bradley 24vdc power supply is for the Inertia Dynamics brake and the 5vdc Mean-Well power supply is for the solid state relay. The relay will control power to the brake and the relay will be controlled by the output from the ClearPath servo. Pay close attention to the polarity on the solid state relay as it is polarity sensitive on the input and output unlike standard mechanical relays.
ClearPath DC servo motor: CPM-SDSK-2311S-EQN
Inertia Dynamics brake: 8923-2331 – purchased from eBay.
Solid state relay: Crydom DC60S3






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}